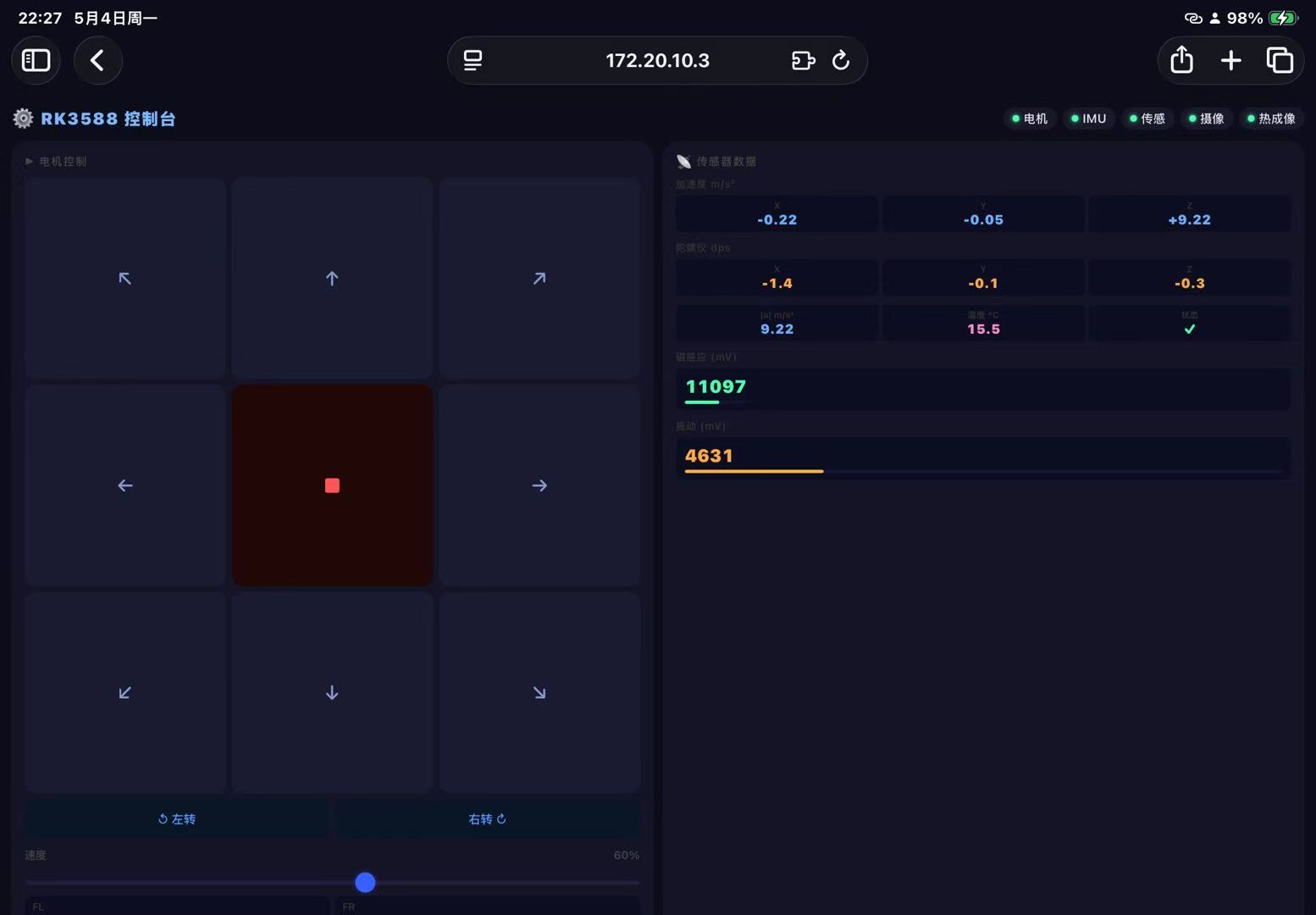
基于 RK3588 开发板的四轮麦克纳姆轮机器人,支持同一 WiFi 下任意设备(手机、平板、电脑)通过网页浏览器远程控制,集成热成像温度采集、六轴 IMU 监测、USB 摄像头实时回传,前端页面适配移动端触屏。项目开源在 GitHub:Yu-Xiang-Yang/rk3588-multimodal-mecanum。

基于 RK3588 开发板的四轮麦克纳姆轮机器人,支持同一 WiFi 下任意设备(手机、平板、电脑)通过网页浏览器远程控制,集成热成像温度采集、六轴 IMU 监测、USB 摄像头实时回传,前端页面适配移动端触屏。项目开源在 GitHub:Yu-Xiang-Yang/rk3588-multimodal-mecanum。
在RK3588 Buildroot系统上部署Python应用时,手动操作步骤繁琐且容易出错——需要通过adb逐一上传文件、安装依赖、配置init.d自启动脚本。为此我写了一套一键部署工具,支持PowerShell和Git Bash,通过一条命令完成从上传到自启动配置的全部流程。项目开源在GitHub:Yu-Xiang-Yang/deploy。
采用的是正点原子店里买的RK3588带显示屏的板子,买来的时候已经装好了linux buildroot系统,我重新烧录过ubuntu的试过,但是他们店里提供的ubuntu烧录的版本缺少太多东西,所以又重新烧录回了linux buildroot系统。
本次通过usb插口直接连接板子,该计算板实际上有多个摄像头插口,原理大同小异,第三章讲述如何在接显示屏的情况下实时显示录取的视频流。第四章讲述如何捕捉帧图像并储存以便用于后续边缘计算